
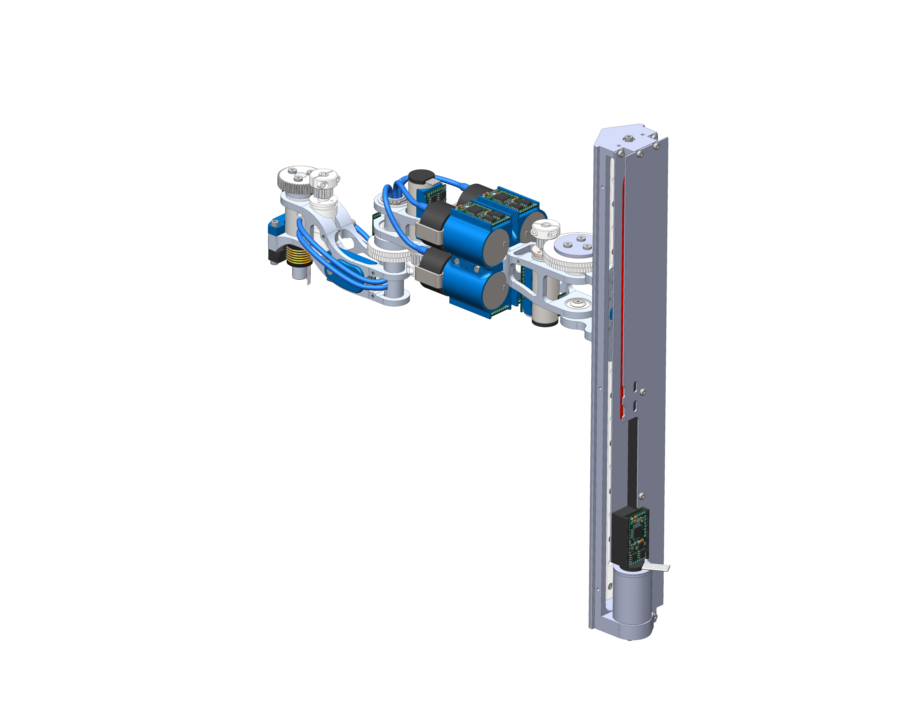
New version of our 4-axis robotic arm
This is a concise presentation of the improvements and main corrections made to the new version of the arms on Debra, our main robot.
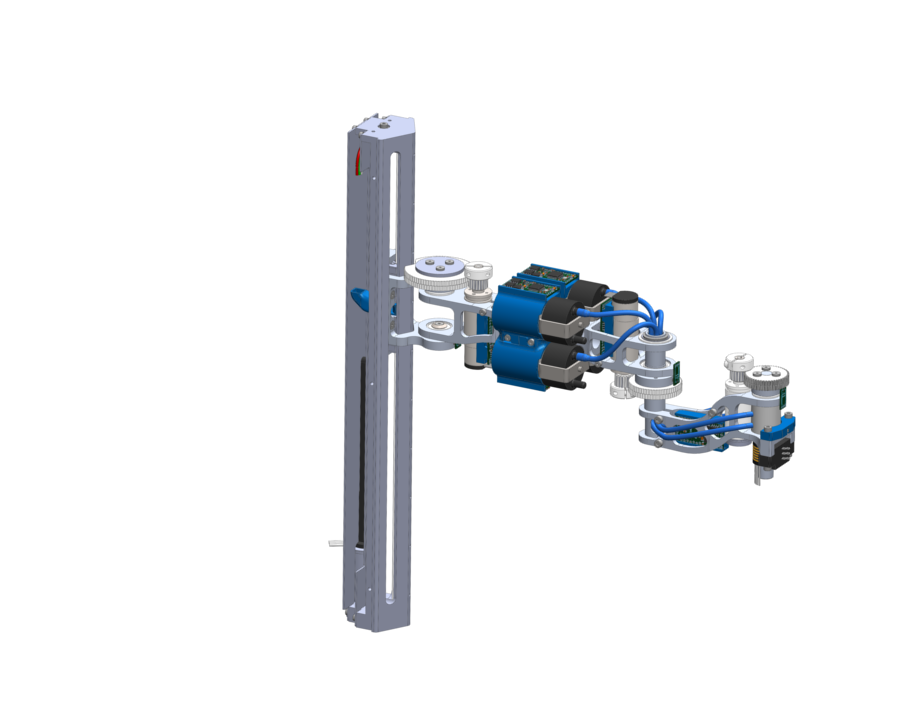
Compared to last year, some problems limiting the motion of the axis of the shoulder as well as the loosening of the trapezoidal lead screw gear mounted at the end of the Z-axis have been corrected.
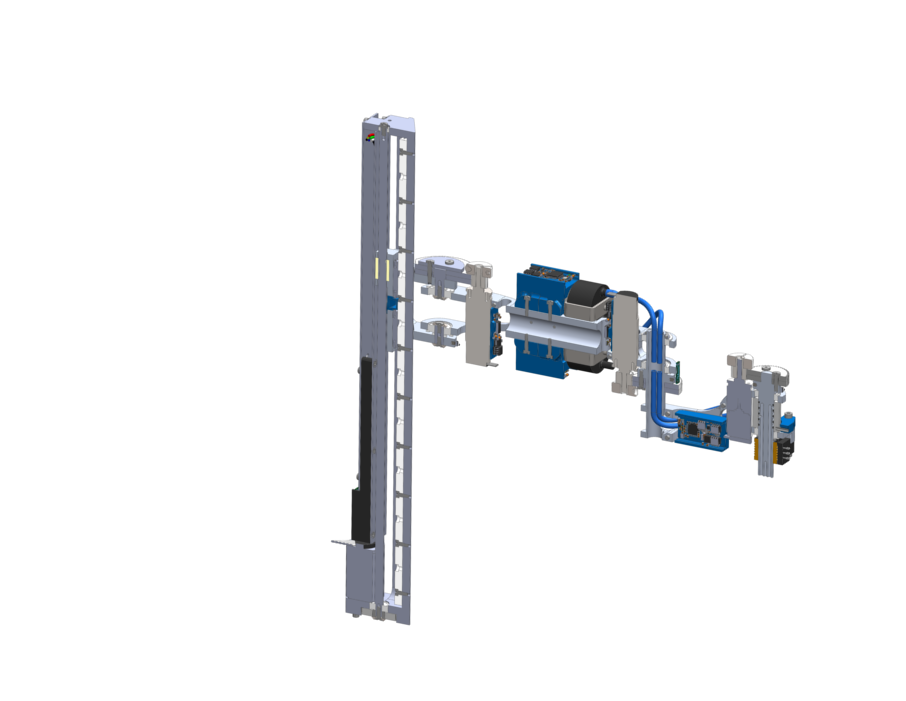
Four pumps were directly integrated onto the upper arm structure. The 4th axis now allows for continuous rotation of the end effector while transmitting four air passages, the electrical power and the CAN bus.
You can visualize our CAD files and download them from our GrabCAD account.